在自动化产线运行过程中,当搬运行程逐渐加长、工件重量不断增加时,很多工程师都会发现:
原本可以稳定运行的三轴机械手,开始出现抖动、精度下降或结构受力不足的问题。
特别是在悬臂式布局中,这类问题会更加明显。
在实际使用中,你可能会遇到这些情况
行程一旦加长,悬臂端稳定性开始下降
当横向行程变长,或者末端安装了较重的夹具后,运行过程中容易出现:
末端轻微晃动
定位重复性不如预期
长时间运行后精度逐步下降
这些问题在低负载时并不明显,但在连续运行的自动化产线上,会逐渐放大。
工件变重后,对直线模组刚性要求明显提高
在搬运较重工件时,你可能会发现:
横梁下挠不可避免
导轨与滑块受力集中
设备对调试和安装精度变得更敏感
如果结构刚性不足,即使参数调得再保守,也很难长期稳定运行。
现场空间受限,结构选择并不多
在一些产线中:
一侧需要悬空作业
地面无法做完整龙门
还要避让输送线或其他设备
这时,常规的龙门式结构并不适合,悬臂方案又对稳定性提出了更高要求。
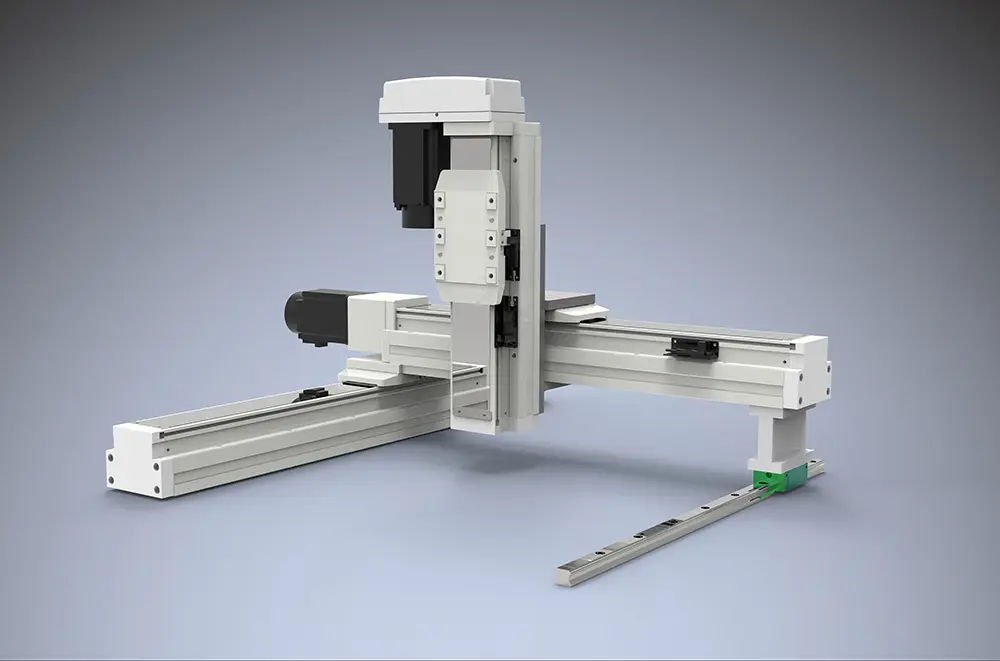
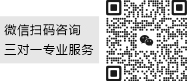
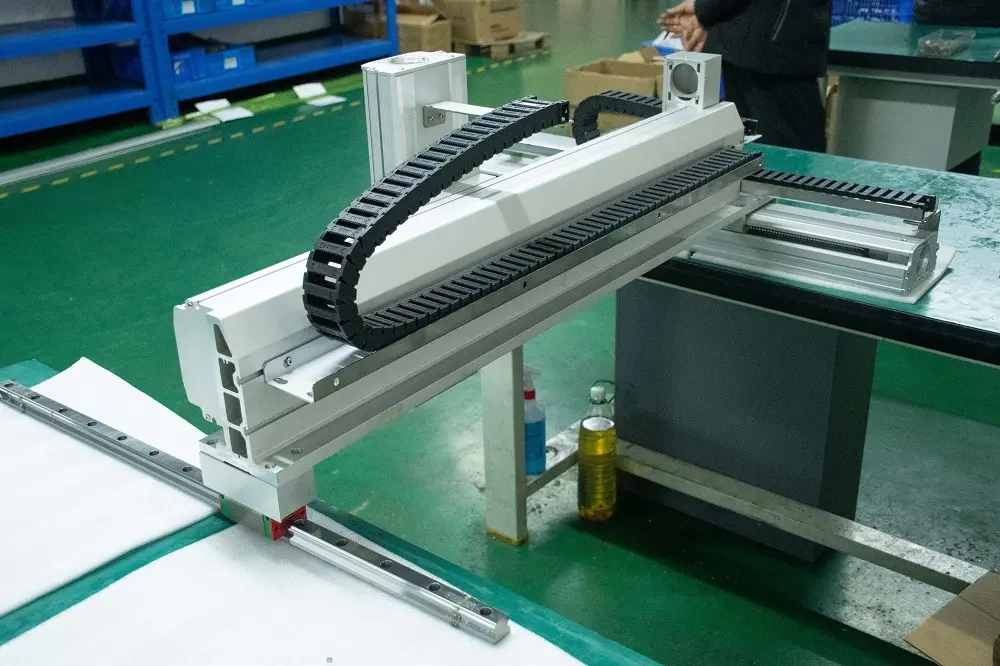
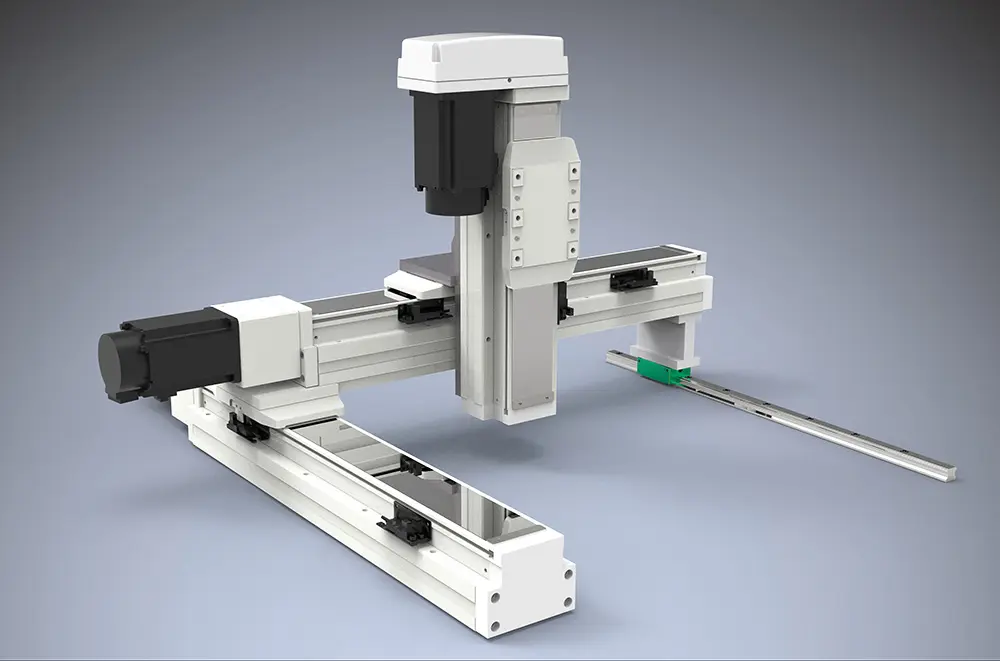
悬臂辅轨式机械手,适合怎样的应用需求?
悬臂辅轨式机械手,是在保持悬臂结构灵活性的同时,通过下方辅轨分担受力,来提升整体稳定性的一种三轴直线模组方案。
对于以下需求场景,这种结构更容易取得平衡:
行程较长,但又希望保持紧凑布局
负载不算极端,但对稳定性有明确要求
设备需要长期连续运行,而不是短时间演示
希望在不显著增加结构复杂度的情况下,提高可靠性

这种结构能带来哪些实际改善?
运行更平稳
辅轨参与受力后,悬臂端的挠度明显降低,在加减速过程中运行更平顺,有利于保持节拍稳定。
精度保持更稳定
在长时间运行和高频往复工况下,结构受力更均匀,有助于维持重复定位表现。
对现场适应性更强
相比完整龙门结构:
占用空间更小
安装方式更灵活
更容易与输送线、机床等设备配合
如果你的应用场景中,
既需要悬臂结构的灵活性,又对运行稳定性有更高要求,
那么悬臂辅轨式机械手,会是一种更容易长期稳定运行的三轴直线模组解决方案。